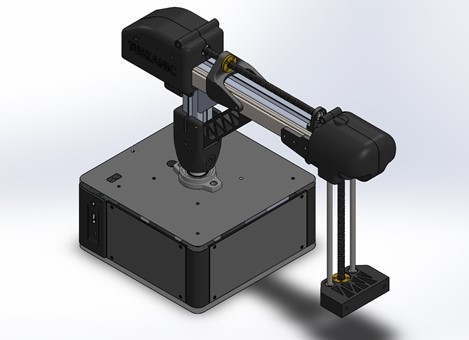
تولید بازوی رباتیکی با چهار درجه آزادی توسط خانم دکتر بابازاده عضو هیات علمی دانشکده فناوری های صنعتی صورت گرفت. با توجه به گسترش و به روز بودن علم رباتیک، تغییر جهت تکنولوژی در سالهای آینده به سمت استفاده از رباتهای گوناگون و ترکیب علوم مختلف مهندسی با علم رباتیک خواهد بود. در این سیستم بازوی رباتیک با چهار درجه آزادی و دو مجری نهایی متفاوت و قابل تعویض ارایه شده است. به صورت پیش فرض برنامه کنترلی به صورت اپلیکیشن طراحی شده روی سیستم عامل اندروید میباشد و امکان برنامه نویسی و پیاده سازی سیستمهای کنترلی مختلف روی بازوی طراحی توسط کاربر فراهم شده است. محاسبات مربوط به سینماتیک مستقیم و معکوس بازوی رباتیک انجام شده و همچنین قبل از پیاده سازی، قسمتهای مختلف الکترونیکی و مکانیکی آن شبیه سازی شده است.
خبری
تولید بازوی رباتیکی با چهار درجه آزادی توسط عضو هیات علمی گروه مهندسی برق خانم دکتر بابازاده
سایز متن