دربخش سخت افزاری، یک افزاره مکمل با شکل کلی مکعب مستطیل با طول و عرض 25 سانتی متر و ارتفاع 16 سانتی متر، با لبه های قفل شونده کنگره ای از جنس پلکسی گلس با ضخامت 6 میلیمتر ساخته شده است، که شامل بورد کنترلی، دو موتور پله ای به همراه مجموعه چرخ دنده ها است. مجموعه چرخ دنده ها، برای تقویت نیروی محرکه در حالت پویش مسیر و نیز تقویت نیروی نگهدارنده در حالت قفل روی هدف اضافه شده اند. افزاره مکمل با قرار گرفتن بین بدنه اصلی تلسکوپ و پایه آن، از هردو طرف با پیچ محکم شده و آزادی چرخش در دو مسیر را دارد. امکان تجاری سازی افزاره مکمل با فروش سخت افزار و نرم افزار طراحی شده به همراه تلسکوپ اصلی وجود دارد. از مزایای طرح می توان به موارد زیر اشاره کرد:
- تسهیل مشاهده سیاره های مختلف برای کاربرانی که آشنایی کامل با دانش نجوم نداشته باشند.
- تسریع فرآیند مکانیابی سیاره ها برای کاربران غیرحرفه ای
- اطمینان از محل سیاره برای رصد در آسمان نسبتاً ابری و یا ابرهایی که بخشی از آسمان را فرا گرفته اند.
فایل تصویری مربوط به عملکرد نرم افزار طراحی شده در محیط اندروید از اینجا قابل مشاهده است.
ب) ربات ترسیم کننده تصویر برای استفاده در پلاترها
هدف از این پروژه، ساخت یک ربات ترسیم کننده تصویر است که با دریافت تصویر از کاربر، طرح آن را با قلم بر روی کاغذ یا هر سطح قابل نوشتن دیگر، پیاده سازی کند. با استفاده از انواع لیزر و حتی قلم های ارزان قیمت مانند مداد، ماژیک و خودکار می توان تصویر عکس را بصورت نقاشی سیاه و سفید یا رنگی بازسازی کرد و یا تصویر را بر روی سطوح سخت حکاکی نمود. اساس عملکرد این ربات، یادآور دستگاه برش یا حکاکی لیزر بر روی سطح دو بعدی است که بطور گسترده در دستگاههای مشابه مورد استفاده قرار گرفته است.
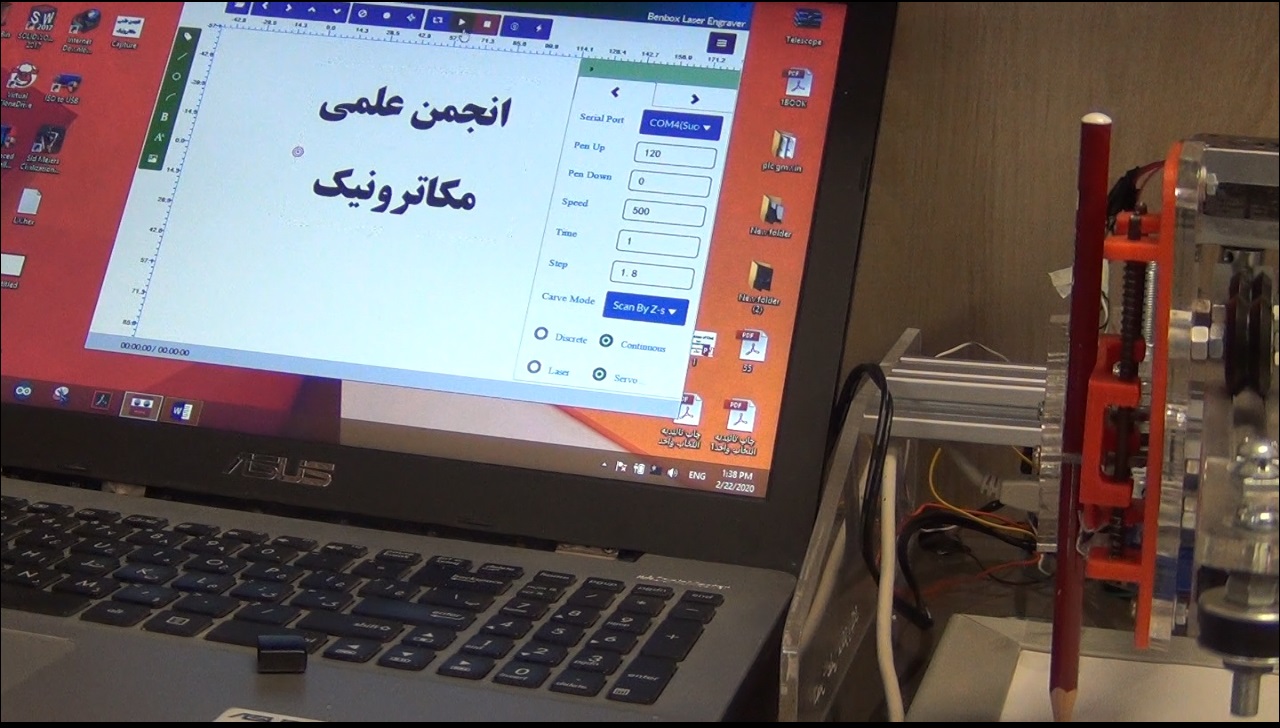

عملکرد دستگاه بدین صورت است که ابتدا تصویر مرجع در یکی از فرمت های jpg، png و bmp دریافت می شود و سپس تبدیل آن به فرمت جی-کد در محیط Benbox صورت می پذیرد. اطلاعات نقاط سیاه و سفید تصویر بصورت مختصات پیکسل ها تفکیک می شوند که پیکسل های سیاه بیانگر مناطقی هستند که عملیات نقاشی یا حکاکی باید روی آن نقاط صورت پذیرد. در این مرحله، بسته به نوع عملیات، یکی از انواع قلم لیزر، مداد، خودکار، ماژیک و ... انتخاب و در بازوی عامل دستگاه نصب می شود. بر اساس مختصات پیکسل های مختلف در تصویر سیاه و سفید، به موتورهای نصب شده در راستای X و Y دستور حرکت به سمت مختصات پیکسل های رنگی داده می شود و پس از ورود به منطقه آرایه ای از پیکسل های رنگی، به قلم توسط یک بازوی عمودی منعطف در راستای Z دستور فرود روی صفحه و حک پیکسل داده می شود. بدیهی است که در تصاویر بزرگتر، پیکسل ها با شفافیت بالاتری تفکیک شده و دستگاه قابلیت اجرایی بهتری دارد.
مشخصات سخت افزار طراحی شده و قابلیتهای آن به شرح زیر است:
- محیط مفید عملیاتی 20cm×20cm
- قابلیت تعویض بخش عامل با لیزر، مداد و خودکار (در حالت استفاده از لیزر سوکت لیزر به کنترلر متصل می شود)
- کنترلر آردینو UNO
- درایور DRV8825
- موتور پله ای با دقت 1.8 درجه در هر پله
- محورهای آلومینیم سخت 20mm×20mm و 20mm×40mm
- پایه های پلکسی گلس 6 میلیمتری
- همگام سازی شده با نرم افزار Benbox
- قابلیت ترسیم تصاویر دریافتی با فرمت jpg، png و bmp
- قابلیت همگام سازی با نرم افزار grblcontroller و grbluniversal
اضافه کردن قابلیت تنظیم میزان فشار قلم در راستای محور Z و یا تنظیم دینامیک توان صادره از لیزر برای پیاده سازی شدت رنگ ها در استاندارد Grayscale با هدف روح بخشیدن به طرح تصویرسازی شده با اعمال سایه روشن در نقاط مختلف تصویر، به عنوان هدف بعدی در لیست فعالیت های انجمن علمی مکاترونیک دانشگاه صنعتی ارومیه قرار دارد. همچنین، پیاده سازی پلاترهای رنگی دوبعدی نیز از جمله اهدافی است که برای فعالیت های این انجمن در سال های آتی تعریف شده است.
فیلم عملکرد دستگاه همانندساز تصویر از اینجا قابل مشاهده است.
فعالیت های انجمن مکاترونیک در سال اول، با تخصیص بودجه 40 میلیون ریالی در سال 1398 در قالب دو پروژه عملی مذکور شکل جدی به خود گرفت. ساخت این دو دستگاه نیز با مشارکت دانشجویان ارشد مکاترونیک دانشگاه صنعتی ارومیه، بویژه آقای پیمان محمودی به عنوان دبیر انجمن، و آقای بهادر اطمینان به عنوان عضو فعال انجمن به مرحله نهایی رسید. لازم به ذکر است هر دو محصول در نمایشگاه معتبر فناوری بین المللی ربع رشیدی که در آبان ماه 1398 در شهر تبریز برگزار شد، به معرض دید عموم علاقمندان گذاشته شد



